Poses
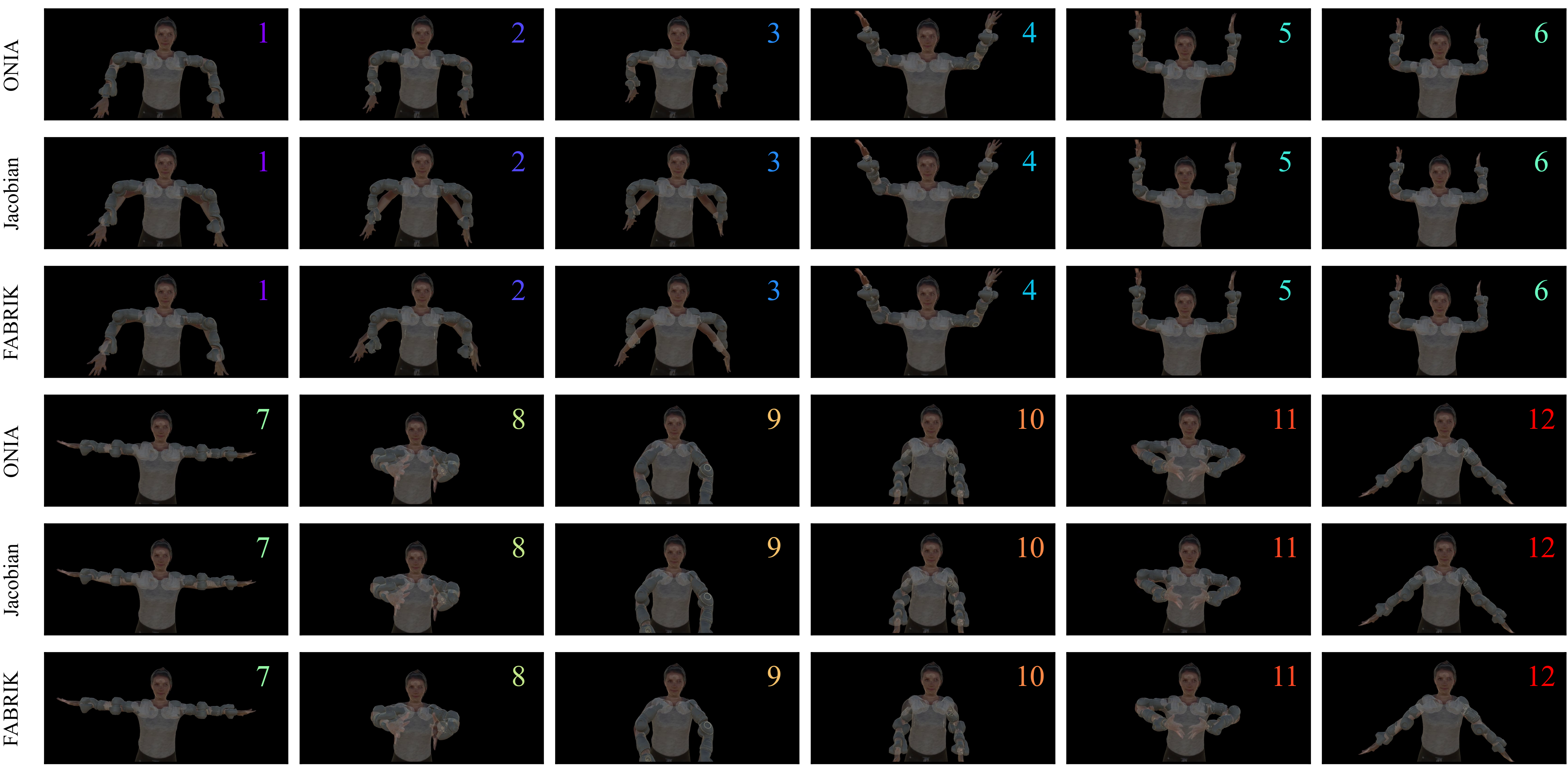
We evaluated the performance of the three solvers through a set of 12 static poses. Poses are chosen in group, with each group representative of one partition of the space of all possible robot arm poses. Poses 1 to 3 covers the general case of hands up, and vary in whether the hand points forward, upright, or backward; Likewise, poses 9 to 11 covers the case of hands down; Poses 5 to 8 covers different cases where the arms are in front of the body; Poses 4 and 12 are the standard T-pose and A-pose.
All poses overview
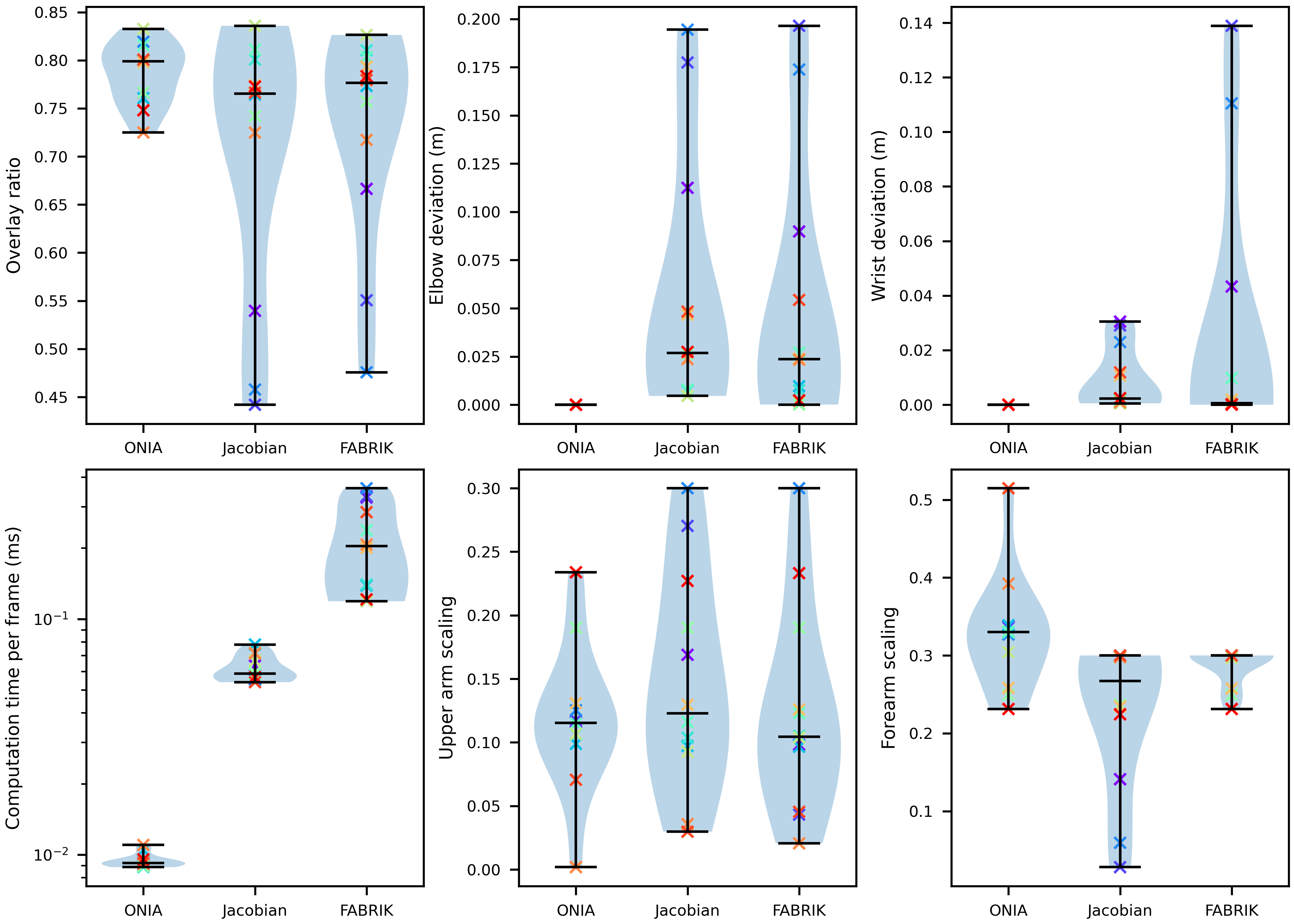
Metrics:
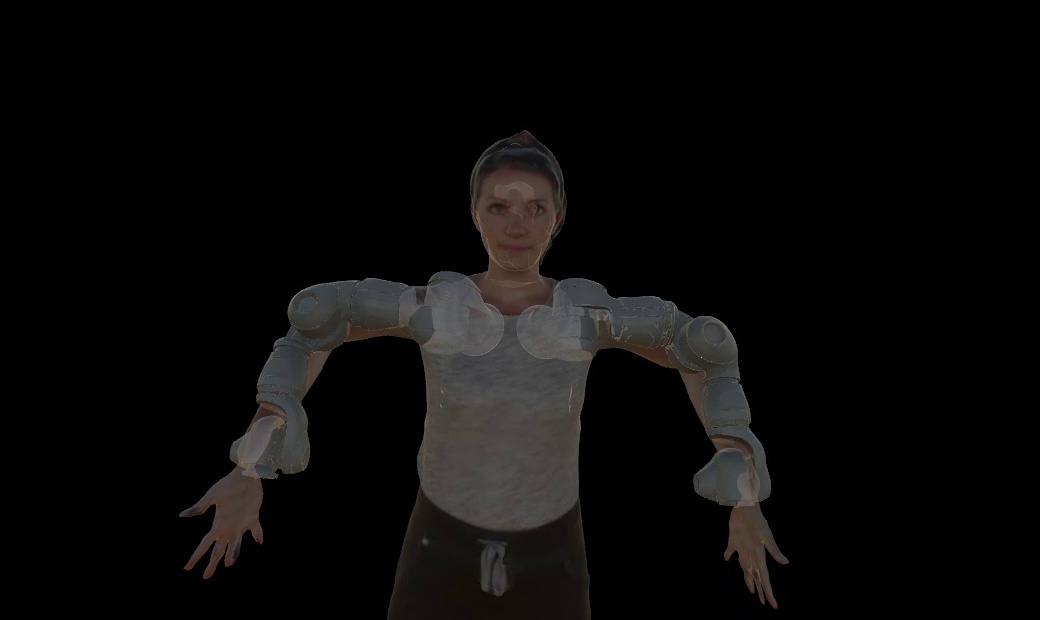
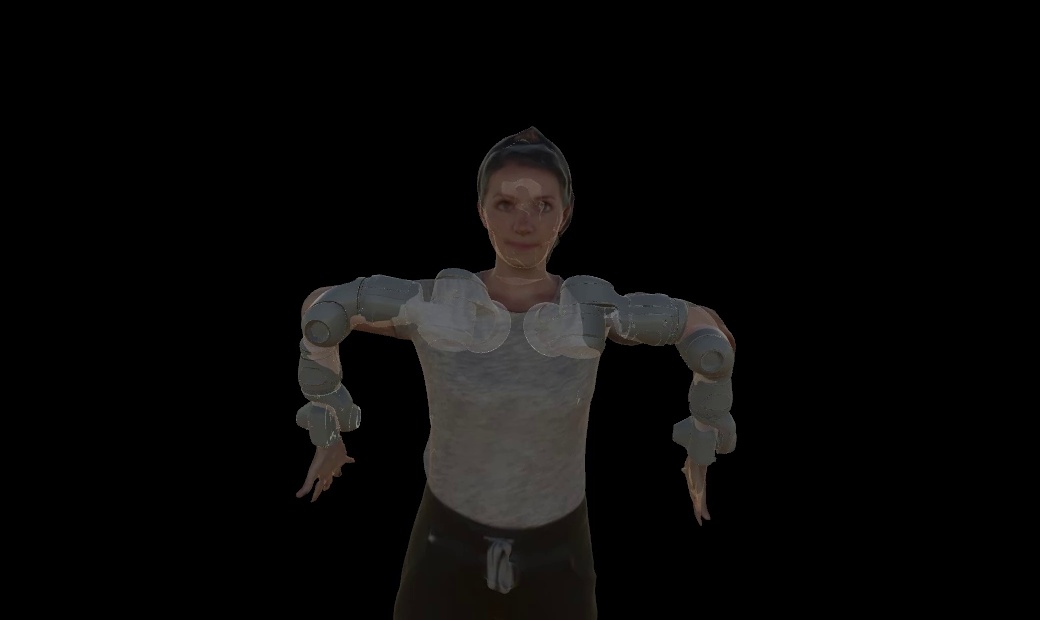
Pose 1
Description: upper arms to the side and parallel to the ground; forearms and hands pointing down to the ground and a bit to the front, forming a right angle with the upper arms. (barely natural for humans)
Images
| ONIA (ours) | Jacobian | FABRIK |
|---|---|---|
 |
 |
 |
Metrics
| Metric | Solvers | |||
|---|---|---|---|---|
| ONIA (ours) | Jacobian | FABRIK | ||
| Overlay ratio | 0.766365 | 0.539608 | 0.666389 | |
| Wrist deviation (m) | Left | 3.8743e-07 | 0.0293432 | 0.0425887 |
| Right | 3.50098e-07 | 0.0316151 | 0.0440972 | |
| Avg. | 3.68764e-07 | 0.0304792 | 0.0433429 | |
| Elbow deviation (m) | Left | 2.98396e-07 | 0.119434 | 0.0987662 |
| Right | 1.9992e-07 | 0.105549 | 0.080948 | |
| Avg. | 2.49158e-07 | 0.112491 | 0.0898571 | |
| Upper arm scaling | Left | 0.857055 | 0.80781 | 0.881984 |
| Right | 0.911098 | 0.854293 | 0.921574 | |
| Avg. | 0.884077 | 0.831051 | 0.901779 | |
| Forearm scaling | Left | 1.35283 | 1.13382 | 1.3 |
| Right | 1.32345 | 1.14823 | 1.3 | |
| Avg. | 1.33814 | 1.14103 | 1.3 | |
| Computation time (s) | Left | 0.0108 | 0.0864 | 0.3354 |
| Right | 0.0073 | 0.0405 | 0.3205 | |
| Avg. | 0.00905 | 0.06345 | 0.32795 | |
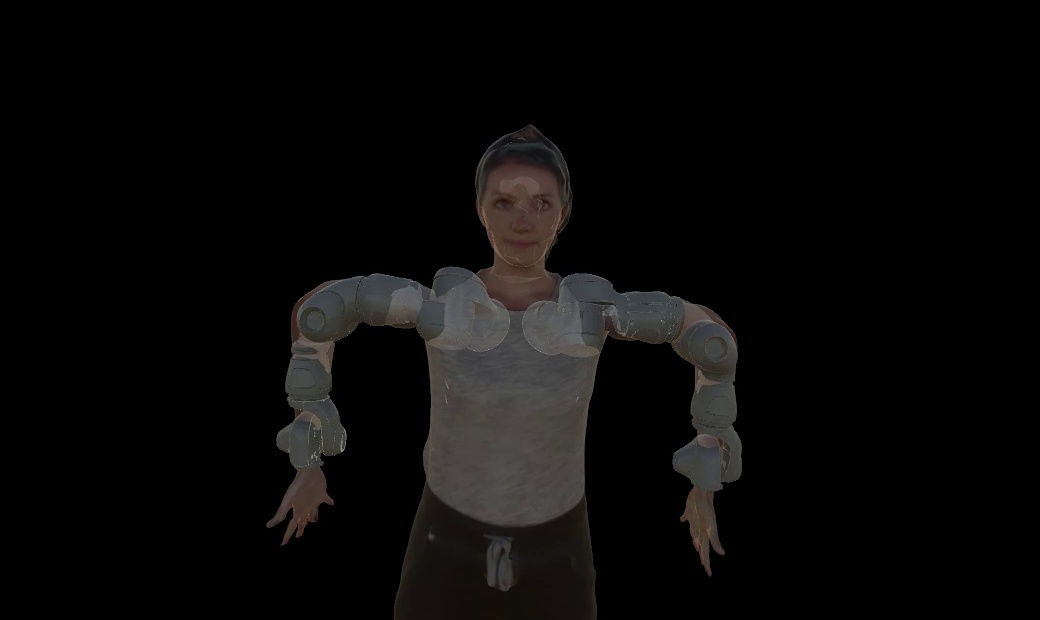
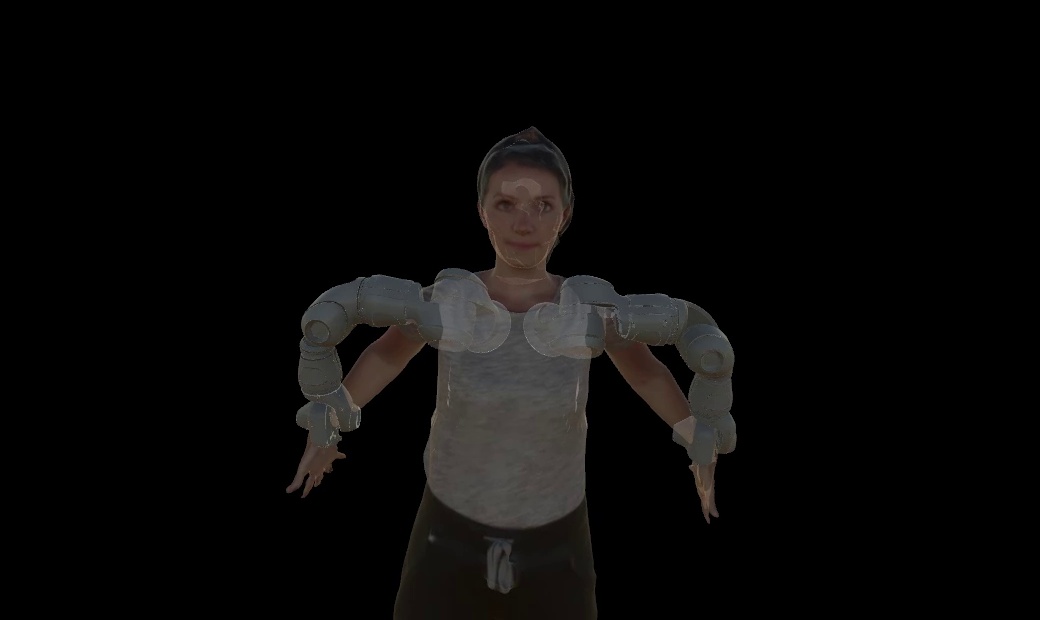
Pose 2
Description: upper arms to the side and parallel to the ground; forearms and hands pointing straight down to the ground, forming a right angle with the upper arms. (unnatural for humans)
Images
| ONIA (ours) | Jacobian | FABRIK |
|---|---|---|
 |
 |
 |
Metrics
| Metric | Solvers | |||
|---|---|---|---|---|
| ONIA (ours) | Jacobian | FABRIK | ||
| Overlay ratio | 0.799706 | 0.44196 | 0.550578 | |
| Wrist deviation (m) | Left | 5.03121e-07 | 0.0264918 | 0.127784 |
| Right | 3.39799e-07 | 0.0316821 | 0.150004 | |
| Avg. | 4.2146e-07 | 0.029087 | 0.138894 | |
| Elbow deviation (m) | Left | 9.42432e-08 | 0.177354 | 0.201369 |
| Right | 1.61181e-07 | 0.177615 | 0.191593 | |
| Avg. | 1.27712e-07 | 0.177485 | 0.196481 | |
| Upper arm scaling | Left | 0.856306 | 0.707283 | 0.934562 |
| Right | 0.908608 | 0.751991 | 0.979059 | |
| Avg. | 0.882457 | 0.729637 | 0.956811 | |
| Forearm scaling | Left | 1.34307 | 0.975567 | 1.3 |
| Right | 1.32904 | 0.968398 | 1.3 | |
| Avg. | 1.33606 | 0.971982 | 1.3 | |
| Computation time (s) | Left | 0.0113 | 0.0731 | 0.3408 |
| Right | 0.0074 | 0.0381 | 0.3235 | |
| Avg. | 0.00935 | 0.0556 | 0.33215 | |
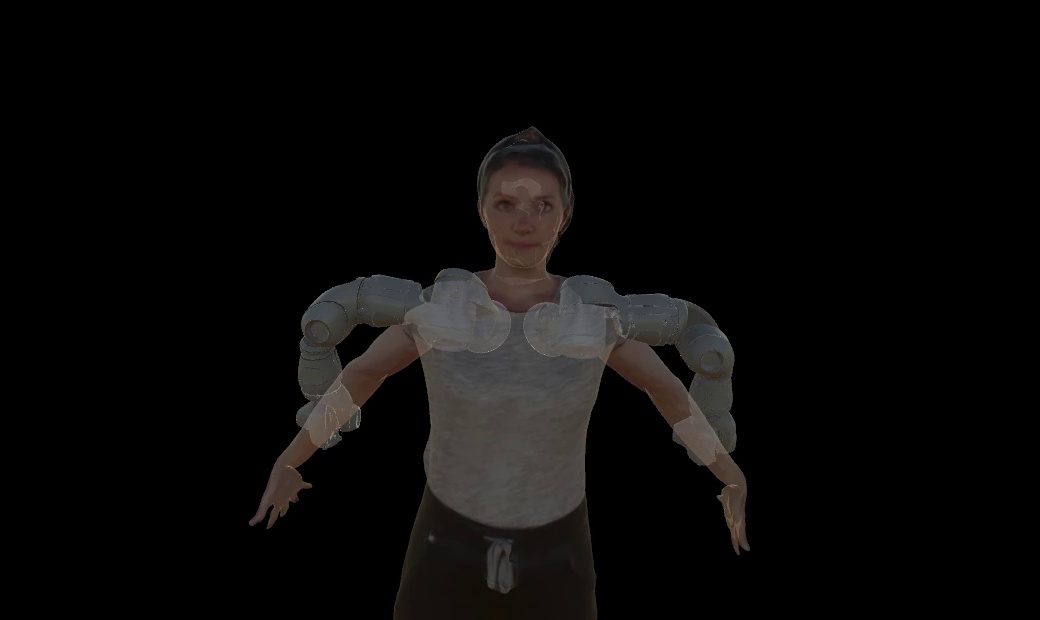
Pose 3
Description: upper arms to the side and parallel to the ground; forearms and hands pointing down to the ground and a bit to the back, forming a right angle with the upper arms. (unnatural for humans)
Images
| ONIA (ours) | Jacobian | FABRIK |
|---|---|---|
 |
 |
 |
Metrics
| Metric | Solvers | |||
|---|---|---|---|---|
| ONIA (ours) | Jacobian | FABRIK | ||
| Overlay ratio | 0.819356 | 0.45772 | 0.475702 | |
| Wrist deviation (m) | Left | 1.93141e-07 | 0.0208567 | 0.104221 |
| Right | 4.15098e-07 | 0.0251126 | 0.116726 | |
| Avg. | 3.0412e-07 | 0.0229847 | 0.110473 | |
| Elbow deviation (m) | Left | 1.90828e-07 | 0.191344 | 0.165518 |
| Right | 1.36571e-07 | 0.197644 | 0.182101 | |
| Avg. | 1.637e-07 | 0.194494 | 0.17381 | |
| Upper arm scaling | Left | 0.844692 | 0.7 | 0.7 |
| Right | 0.904684 | 0.7 | 0.7 | |
| Avg. | 0.874688 | 0.7 | 0.7 | |
| Forearm scaling | Left | 1.33006 | 0.94176 | 1.3 |
| Right | 1.32373 | 0.939586 | 1.3 | |
| Avg. | 1.3269 | 0.940673 | 1.3 | |
| Computation time (s) | Left | 0.0108 | 0.0704 | 0.3342 |
| Right | 0.0072 | 0.0399 | 0.3837 | |
| Avg. | 0.009 | 0.05515 | 0.35895 | |
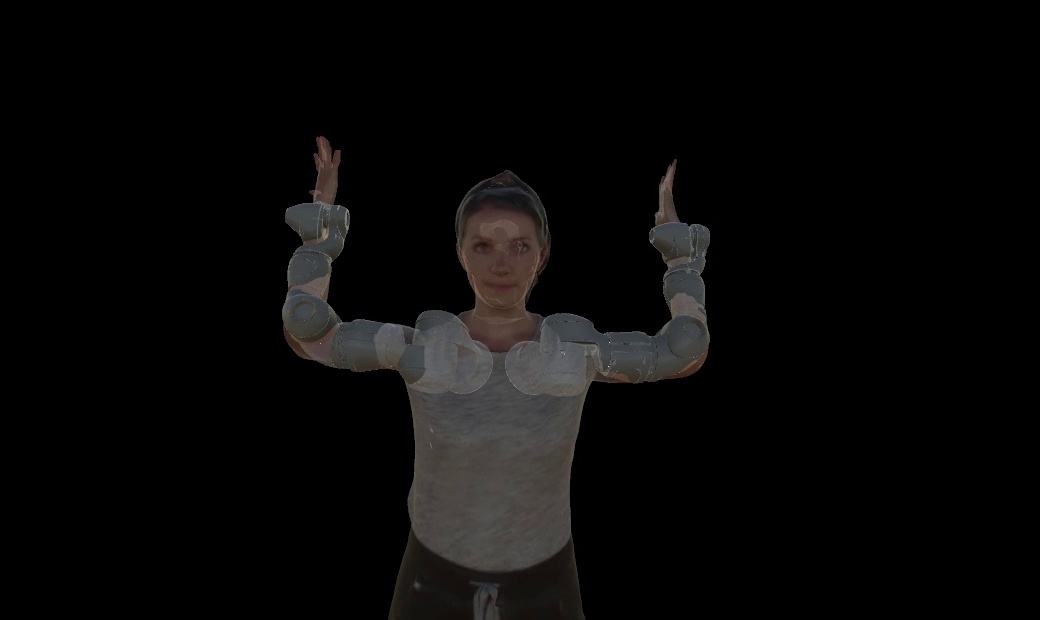
Pose 4
Description: upper arms to the side and parallel to the ground; forearms and hands pointing up and a bit to the front, forming a right angle with the upper arms.
Images
| ONIA (ours) | Jacobian | FABRIK |
|---|---|---|
 |
 |
 |
Metrics
| Metric | Solvers | |||
|---|---|---|---|---|
| ONIA (ours) | Jacobian | FABRIK | ||
| Overlay ratio | 0.760668 | 0.764318 | 0.773317 | |
| Wrist deviation (m) | Left | 4.10864e-07 | 0.00317555 | 0.000419434 |
| Right | 1.3411e-07 | 0.000802382 | 0.00028065 | |
| Avg. | 2.72487e-07 | 0.00198897 | 0.000350042 | |
| Elbow deviation (m) | Left | 1.46001e-07 | 0.0125198 | 0.0154571 |
| Right | 4.21468e-08 | 0.0029745 | 0.00375389 | |
| Avg. | 9.40739e-08 | 0.00774715 | 0.00960552 | |
| Upper arm scaling | Left | 0.876265 | 0.879465 | 0.88072 |
| Right | 0.92602 | 0.926201 | 0.926184 | |
| Avg. | 0.901143 | 0.902833 | 0.903452 | |
| Forearm scaling | Left | 1.36326 | 1.3 | 1.3 |
| Right | 1.3145 | 1.3 | 1.3 | |
| Avg. | 1.33888 | 1.3 | 1.3 | |
| Computation time (s) | Left | 0.0122 | 0.1132 | 0.1691 |
| Right | 0.0087 | 0.0427 | 0.1082 | |
| Avg. | 0.01045 | 0.07795 | 0.13865 | |
Pose 5
Description: upper arms to the side and parallel to the ground; forearms and hands pointing straight up and , forming a right angle with the upper arms.
Images
| ONIA (ours) | Jacobian | FABRIK |
|---|---|---|
 |
 |
 |
Metrics
| Metric | Solvers | |||
|---|---|---|---|---|
| ONIA (ours) | Jacobian | FABRIK | ||
| Overlay ratio | 0.800069 | 0.800757 | 0.810365 | |
| Wrist deviation (m) | Left | 1.9992e-07 | 0.0030345 | 0.000676116 |
| Right | 3.05383e-07 | 0.000148244 | 0.000504133 | |
| Avg. | 2.52651e-07 | 0.00159137 | 0.000590124 | |
| Elbow deviation (m) | Left | 1.49012e-07 | 0.0120602 | 0.0148265 |
| Right | 1.36571e-07 | 0.00241702 | 0.000230632 | |
| Avg. | 1.42792e-07 | 0.00723861 | 0.00752856 | |
| Upper arm scaling | Left | 0.874065 | 0.878981 | 0.876564 |
| Right | 0.913246 | 0.913566 | 0.913197 | |
| Avg. | 0.893655 | 0.896274 | 0.894881 | |
| Forearm scaling | Left | 1.36045 | 1.3 | 1.3 |
| Right | 1.29873 | 1.29648 | 1.29873 | |
| Avg. | 1.32959 | 1.29824 | 1.29937 | |
| Computation time (s) | Left | 0.0106 | 0.0729 | 0.1717 |
| Right | 0.0071 | 0.0405 | 0.1089 | |
| Avg. | 0.00885 | 0.0567 | 0.1403 | |
Pose 6
Description: upper arms to the side and parallel to the ground; forearms and hands pointing up and a bit to the back, forming a right angle with the upper arms.
Images
| ONIA (ours) | Jacobian | FABRIK |
|---|---|---|
 |
 |
 |
Metrics
| Metric | Solvers | |||
|---|---|---|---|---|
| ONIA (ours) | Jacobian | FABRIK | ||
| Overlay ratio | 0.815722 | 0.811068 | 0.803407 | |
| Wrist deviation (m) | Left | 2.48564e-07 | 0.00285447 | 0.0102493 |
| Right | 6.664e-08 | 0.00152383 | 0.00929935 | |
| Avg. | 1.57602e-07 | 0.00218915 | 0.00977434 | |
| Elbow deviation (m) | Left | 1.68587e-07 | 0.0115463 | 0.0293615 |
| Right | 8.42937e-08 | 0.0042278 | 0.0247809 | |
| Avg. | 1.26441e-07 | 0.00788705 | 0.0270712 | |
| Upper arm scaling | Left | 0.866235 | 0.863735 | 0.857599 |
| Right | 0.903946 | 0.903946 | 0.89633 | |
| Avg. | 0.885091 | 0.883841 | 0.876965 | |
| Forearm scaling | Left | 1.35756 | 1.3 | 1.3 |
| Right | 1.30404 | 1.29935 | 1.3 | |
| Avg. | 1.3308 | 1.29968 | 1.3 | |
| Computation time (s) | Left | 0.0116 | 0.0762 | 0.2582 |
| Right | 0.0073 | 0.0399 | 0.2182 | |
| Avg. | 0.00945 | 0.05805 | 0.2382 | |
Pose 7
Description: the standard T-pose; arms straight to the side and parallel to the ground; palms facing down;
Images
| ONIA (ours) | Jacobian | FABRIK |
|---|---|---|
 |
 |
 |
Metrics
| Metric | Solvers | |||
|---|---|---|---|---|
| ONIA (ours) | Jacobian | FABRIK | ||
| Overlay ratio | 0.76652 | 0.741975 | 0.757146 | |
| Wrist deviation (m) | Left | 1.20137e-07 | 0.00130262 | 0.000142583 |
| Right | 1.3411e-07 | 0.00122625 | 0.000850198 | |
| Avg. | 1.27124e-07 | 0.00126444 | 0.000496391 | |
| Elbow deviation (m) | Left | 1.22878e-07 | 0.0271287 | 0.000146695 |
| Right | 9.42432e-08 | 0.0257213 | 5.01819e-05 | |
| Avg. | 1.08561e-07 | 0.026425 | 9.84383e-05 | |
| Upper arm scaling | Left | 0.778936 | 0.778594 | 0.778861 |
| Right | 0.840585 | 0.840684 | 0.840499 | |
| Avg. | 0.80976 | 0.809639 | 0.80968 | |
| Forearm scaling | Left | 1.28544 | 1.27395 | 1.28544 |
| Right | 1.21354 | 1.19938 | 1.21354 | |
| Avg. | 1.24949 | 1.23666 | 1.24949 | |
| Computation time (s) | Left | 0.0101 | 0.0772 | 0.131 |
| Right | 0.0078 | 0.0415 | 0.1092 | |
| Avg. | 0.00895 | 0.05935 | 0.1201 | |
Pose 8
Description: the pose of someone holding an object up in front of oneself; arms slightly bent.
Images
| ONIA (ours) | Jacobian | FABRIK |
|---|---|---|
 |
 |
 |
Metrics
| Metric | Solvers | |||
|---|---|---|---|---|
| ONIA (ours) | Jacobian | FABRIK | ||
| Overlay ratio | 0.832543 | 0.835825 | 0.826344 | |
| Wrist deviation (m) | Left | 4.90155e-07 | 0.000802896 | 0.000711202 |
| Right | 3.61641e-07 | 0.000190337 | 0.00036565 | |
| Avg. | 4.25898e-07 | 0.000496616 | 0.000538426 | |
| Elbow deviation (m) | Left | 1.97686e-07 | 0.00488279 | 0.00367867 |
| Right | 2.42573e-07 | 0.00428272 | 0.000152628 | |
| Avg. | 2.2013e-07 | 0.00458276 | 0.00191565 | |
| Upper arm scaling | Left | 0.908585 | 0.92473 | 0.914281 |
| Right | 0.877877 | 0.889876 | 0.877823 | |
| Avg. | 0.893231 | 0.907303 | 0.896052 | |
| Forearm scaling | Left | 1.31484 | 1.3 | 1.3 |
| Right | 1.29357 | 1.29778 | 1.29357 | |
| Avg. | 1.3042 | 1.29889 | 1.29678 | |
| Computation time (s) | Left | 0.0114 | 0.0925 | 0.1269 |
| Right | 0.0071 | 0.0406 | 0.1111 | |
| Avg. | 0.00925 | 0.06655 | 0.119 | |
Pose 9
Description: the pose of someone operating something on the table while standing; arms slightly bent.
Images
| ONIA (ours) | Jacobian | FABRIK |
|---|---|---|
 |
 |
 |
Metrics
| Metric | Solvers | |||
|---|---|---|---|---|
| ONIA (ours) | Jacobian | FABRIK | ||
| Overlay ratio | 0.798132 | 0.7741 | 0.793365 | |
| Wrist deviation (m) | Left | 8.9407e-08 | 0.0105452 | 0.00186725 |
| Right | 3.93755e-07 | 0.0108541 | 0.00193578 | |
| Avg. | 2.41581e-07 | 0.0106997 | 0.00190152 | |
| Elbow deviation (m) | Left | 1.93141e-07 | 0.0505079 | 0.0328233 |
| Right | 2.73143e-07 | 0.042835 | 0.0150312 | |
| Avg. | 2.33142e-07 | 0.0466714 | 0.0239273 | |
| Upper arm scaling | Left | 0.866348 | 0.867067 | 0.873175 |
| Right | 0.871757 | 0.873618 | 0.874999 | |
| Avg. | 0.869052 | 0.870343 | 0.874087 | |
| Forearm scaling | Left | 1.24841 | 1.21924 | 1.2466 |
| Right | 1.26812 | 1.24974 | 1.26837 | |
| Avg. | 1.25827 | 1.23449 | 1.25749 | |
| Computation time (s) | Left | 0.0115 | 0.0762 | 0.2338 |
| Right | 0.0068 | 0.0674 | 0.167 | |
| Avg. | 0.00915 | 0.0718 | 0.2004 | |
Pose 10
Description: the pose of someone sitting; elbows at the waist and pointing back; forearms pointing forward.
Images
| ONIA (ours) | Jacobian | FABRIK |
|---|---|---|
 |
 |
 |
Metrics
| Metric | Solvers | |||
|---|---|---|---|---|
| ONIA (ours) | Jacobian | FABRIK | ||
| Overlay ratio | 0.724998 | 0.724817 | 0.717264 | |
| Wrist deviation (m) | Left | 2.78377e-07 | 0.00109942 | 0.000118717 |
| Right | 3.1575e-07 | 0.000674893 | 0.000598625 | |
| Avg. | 2.97063e-07 | 0.000887157 | 0.000358671 | |
| Elbow deviation (m) | Left | 2.73143e-07 | 0.0293805 | 0.0285485 |
| Right | 2.68221e-07 | 0.0180183 | 0.0181389 | |
| Avg. | 2.70682e-07 | 0.0236994 | 0.0233437 | |
| Upper arm scaling | Left | 0.971101 | 0.929012 | 0.948063 |
| Right | 1.02519 | 0.999521 | 1.01074 | |
| Avg. | 0.998148 | 0.964267 | 0.979401 | |
| Forearm scaling | Left | 1.4149 | 1.29572 | 1.3 |
| Right | 1.36961 | 1.29979 | 1.3 | |
| Avg. | 1.39226 | 1.29776 | 1.3 | |
| Computation time (s) | Left | 0.0134 | 0.0773 | 0.2265 |
| Right | 0.0086 | 0.0658 | 0.1877 | |
| Avg. | 0.011 | 0.07155 | 0.2071 | |
Pose 11
Description: the pose of someone holding an object close in front of one’s chest with two hands; arms acutely bend; upper arms parallel to the ground;
Images
| ONIA (ours) | Jacobian | FABRIK |
|---|---|---|
 |
 |
 |
Metrics
| Metric | Solvers | |||
|---|---|---|---|---|
| ONIA (ours) | Jacobian | FABRIK | ||
| Overlay ratio | 0.800783 | 0.766429 | 0.779513 | |
| Wrist deviation (m) | Left | 5.37269e-07 | 0.0134984 | 0.000214801 |
| Right | 4.09714e-07 | 0.0102553 | 0.000342506 | |
| Avg. | 4.73492e-07 | 0.0118768 | 0.000278653 | |
| Elbow deviation (m) | Left | 1.89075e-07 | 0.0527762 | 0.0632329 |
| Right | 1.19209e-07 | 0.0438051 | 0.04548 | |
| Avg. | 1.54142e-07 | 0.0482907 | 0.0543565 | |
| Upper arm scaling | Left | 1.06414 | 0.954327 | 0.934574 |
| Right | 1.07712 | 0.986143 | 0.974613 | |
| Avg. | 1.07063 | 0.970235 | 0.954594 | |
| Forearm scaling | Left | 1.55485 | 1.3 | 1.3 |
| Right | 1.47476 | 1.3 | 1.3 | |
| Avg. | 1.51481 | 1.3 | 1.3 | |
| Computation time (s) | Left | 0.0113 | 0.0712 | 0.3102 |
| Right | 0.0071 | 0.0367 | 0.2581 | |
| Avg. | 0.0092 | 0.05395 | 0.28415 | |
Pose 12
Description: the standard A-pose; arms straight and 45 degrees away from the body; palms facing inwards.
Images
| ONIA (ours) | Jacobian | FABRIK |
|---|---|---|
 |
 |
 |
Metrics
| Metric | Solvers | |||
|---|---|---|---|---|
| ONIA (ours) | Jacobian | FABRIK | ||
| Overlay ratio | 0.748028 | 0.772711 | 0.783473 | |
| Wrist deviation (m) | Left | 2.14908e-07 | 0.00293853 | 1.53082e-05 |
| Right | 2.73143e-07 | 0.00190545 | 2.04843e-05 | |
| Avg. | 2.44025e-07 | 0.00242199 | 1.78963e-05 | |
| Elbow deviation (m) | Left | 1.51963e-07 | 0.030738 | 0.00133097 |
| Right | 3.06834e-07 | 0.0240416 | 0.00322495 | |
| Avg. | 2.29398e-07 | 0.0273898 | 0.00227796 | |
| Upper arm scaling | Left | 0.769074 | 0.77749 | 0.769481 |
| Right | 0.763186 | 0.768328 | 0.764131 | |
| Avg. | 0.76613 | 0.772909 | 0.766806 | |
| Forearm scaling | Left | 1.24287 | 1.23347 | 1.24287 |
| Right | 1.21956 | 1.21535 | 1.21957 | |
| Avg. | 1.23122 | 1.22441 | 1.23122 | |
| Computation time (s) | Left | 0.0117 | 0.0737 | 0.1295 |
| Right | 0.0074 | 0.0395 | 0.1127 | |
| Avg. | 0.00955 | 0.0566 | 0.1211 | |